智能车竞赛
硬件方面
人机交互
环岛处理
方向控制
速度闭环
偏差计算
电磁数据处理
本文档使用 MrDoc 发布
-
+
首页
硬件方面
## 电源 ### 数字电源 5V,3.3V  其中MGND意味着是模拟地,SGND为数字地,下同。 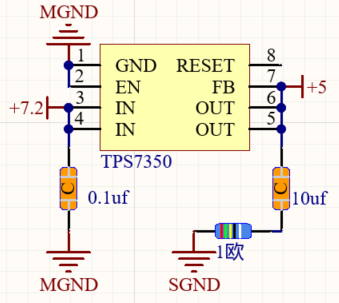 *电容电阻的容值阻值不可改变 ### 模拟电源 5V,12V 模拟电源,那当然全是模拟地咯  *电容为滤波电容,不建议更改 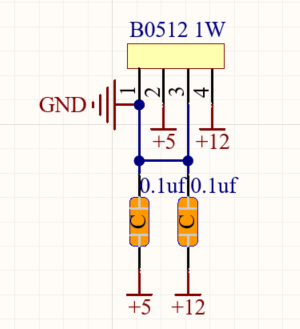 *电容为滤波电容,可根据需要更改 ### 隔离电路 使用74HC245做PWM波隔离,建议跟主控放一起,这样主控输出的PWM已经是隔离过的了,前期测试出问题也不会烧单片机。 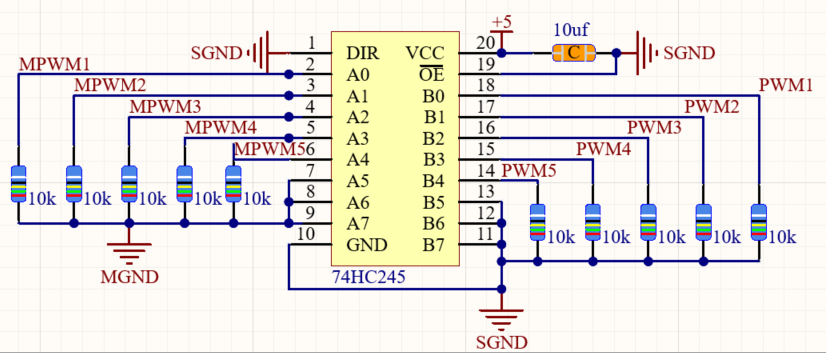 *电容为滤波电容,可根据需要更改,电阻为上拉电阻,不建议更改 模拟地与数字地的连接  图中使用了0Ω电阻,实际上直接连导线或者磁珠电感都可。前期测试不要将地连在铺铜上,这样可直观的看出线宽够不够走电流,同时硬改电路也方便点。 ## 电机驱动 IR2104 H桥/全桥驱动 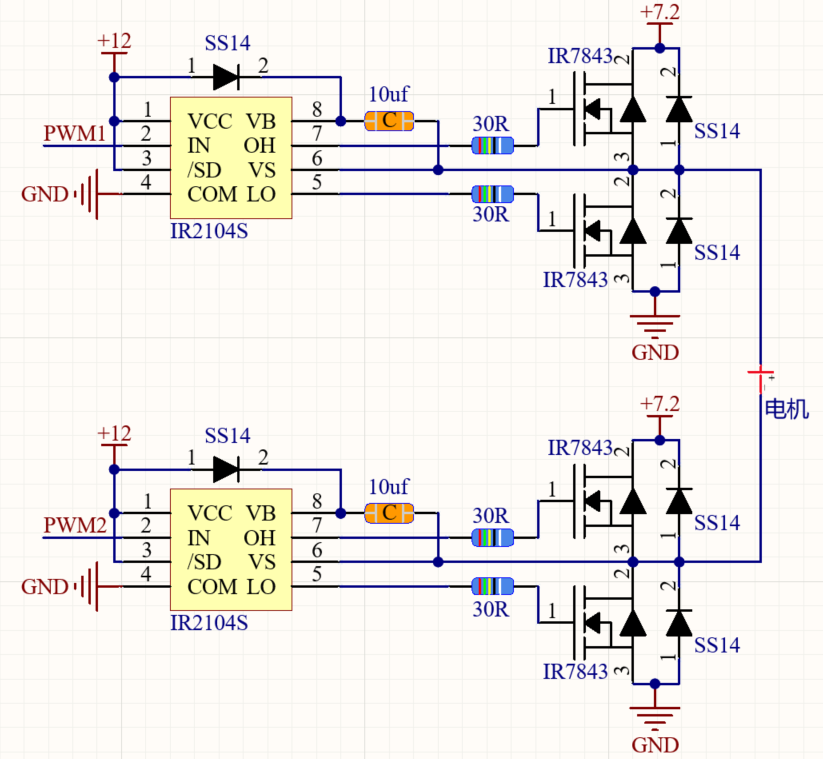 *电容电阻的容值阻值不可改变 IR2104用来将输入的PWM波变成正负极性对调的两个PWM波,其中OH(7号)为高边,LO(5号)为低边,同时峰值应为12V。 电驱不工作应先判断IR2104是否正常工作(需单独测IR2104,此时不要接后续的元器件,10uf的电容要接),之后检查后续的元件焊接是否正确,以及是否使用的是SS14二极管,(不是SS14二极管有可能导致波形畸形) ## 电磁信号处理 OPA2350 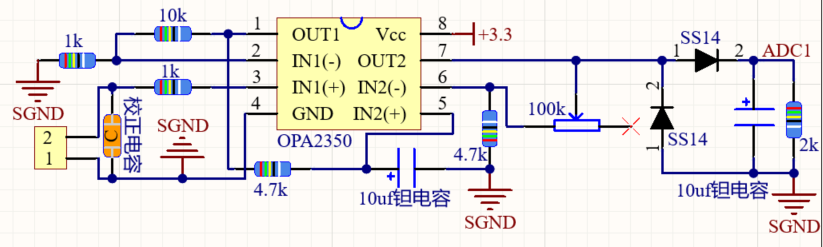 该电路的部分电阻可调,这会改变放大倍数 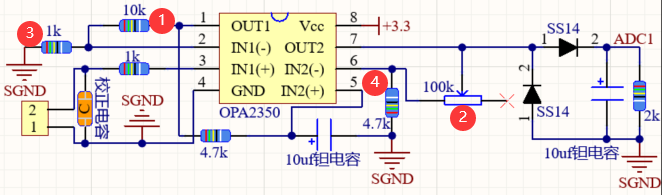 放大倍数是:(1+①/③)*(1+②/④) 增大①②或者减小③④均可增大放大倍数 其他电阻电容不推荐修改 ## 电磁信号处理 OPA4377  放大倍数是:(①+②+③)/① ## 其他 ### 速度检测——编码器 注意方向即可,无其他事项 ### 调试通信——串口 不管是蓝牙还是无线,本质都是用的串口。其中无线传输距离远,抗干扰稍微强那么一点。 ### 电感排布方式 #### 双水平电感排布 最基础的排布方案,在距离地面H处水平方向排布两个相距L的工字电感,两个电感的轴线在同一水平线上。 该方案只可简单地判断直线上的偏移量,在一些常规的基本元素上几乎无用,比如无法识别直角弯。 #### 八字型电感排布 该方案是在上述方案的基础上将左右两个电感分别顺逆时针旋转相同的角度。 该方案倒是能判断直角弯了,但在路况变化较大的地方表现不佳。 #### 双T型电感排布 上述两个方案都只用了两个电感,八字形排布的问题在于无法精确的计算横竖方向上的偏差,如果将横竖分量分开,那就解决了这个问题。 “双T型”就这样诞生了,水平电感于竖直电感两两垂直。能精确的解析出偏离方向与偏差量。 #### 五电感排布方案 该方案原理和效果与上述方案一致,只在中间多了一个电感,用于辅助判断环岛,坡道。
boiling
2023年12月25日 10:48
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
分享
链接
类型
密码
更新密码