智能车竞赛
硬件方面
人机交互
环岛处理
方向控制
速度闭环
偏差计算
电磁数据处理
本文档使用 MrDoc 发布
-
+
首页
环岛处理
## 环岛处理 ### 感值判断法 小车在接近圆环时,最中间的电感值会增大,条件合适时约为直道的两倍。确定为圆环后,关闭横置电感,用竖直电感循迹入环,入环后关闭竖直电感,用横置电感循迹,小车就会自动出环,之后再切换到正常循迹。 ### 环岛标志位 该方法是在上一种方法中改良而成,但操作较为复杂。 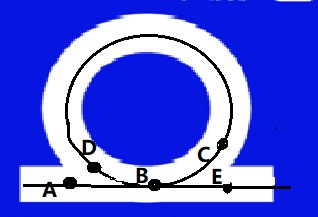 我们将环岛如图分出A,B,C,D,E五个特征点,由于B点为双线圈,会导致B点处的电感值为其他元素的两倍,但此时电感产生的偏差较小,不足以入环。不过我们可以给横竖电感乘个比例系数。 ```C float K,Q;//k为横电感比例系数,q为竖电感比例系数 length = ((sqrt(ad1)-sqrt(ad4))*K+(sqrt(ad2)-sqrt(ad5))*Q)/(ad1+ad2+ad4+ad5); ``` 这时,在入环前AB段,加大K,减少Q来保证平稳前进,在入环过程BC段,减少K,加大Q来使用竖直电感入环,CD段可正常处理,在出环过程DB段减少K,加大Q使用竖直电感出环,出环后BE段加大K,减少Q保证平稳前进,也可直接按普通赛道处理。 除了要调试出合适的K,Q值,还要找出可用的标志位特征是此法的难点,不过调好后要比感值判断法强很多。
boiling
2023年12月25日 10:52
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
分享
链接
类型
密码
更新密码